ŲĮ║ŌÖCŲ„╚╦(balancing robot)ėųĘQūįŲĮ║ŌÖCŲ„╚╦(self-balancing robot),Ųõ Ąõą═ŽĄĮyėąā╔ŅÉŻ║═╚╩ĮŲĮ║ŌÖCŲ„╚╦(legged balancing robot)║═▌å╩ĮŲĮ║ŌÖCŲ„╚╦ (wheeled balancing robot)ĪŻŲõųąŻ¼▌å╩ĮŲĮ║ŌÖCŲ„╚╦ėųĘų×ķd▌åÖCŲ„╚╦(single- wheeled robot)║═ā╔▌åÖCŲ„╚╦(two-wheeled robot)ĪŻ
ā╔▌åŲĮ║ŌÖCŲ„╚╦(two-wheeled balancing robot),║åĘQā╔▌åÖCŲ„╚╦Ż¼╝╚ī┘ė┌ ĮYśŗąįĘ┬╔·ÖCŲ„╚╦ŽĄĮy(robotic system),ėųī┘ė┌įŁ└ĒąįĘ┬╔·ÖCŲ„╚╦ŽĄĮyĪŻĮYśŗ ╔ŽŻ¼ā╔▌åÖCŲ„╚╦─ŻöM╚╦Ą─ų▒┴óū╦æBŻ╗įŁ└Ē╔ŽŻ¼ā╔▌åÖCŲ„╚╦─ŻöM╚╦Ą─ŲĮ║Ō╝╝─▄ĪŻ
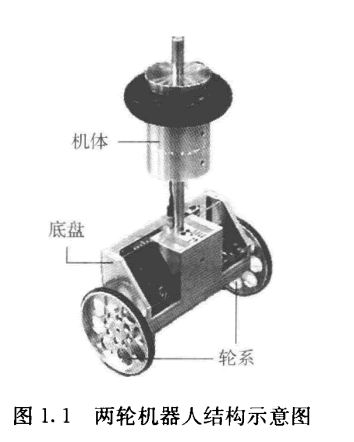
╚ńłD1.1╦∙╩ŠŻ¼ā╔▌åÖCŲ„╚╦Ą─ÖC¾wĮYśŗ═©│Ż░³║¼Ż║
(1)ÖC¾w(body) ĪŻ ų├ė┌Ąū▒Pų«╔ŽŻ¼┐╔čb▌dĖ„ĘNļŖūėįOéõŻ¼╚ńÖC▌d╣ż┐žÖCĪóöĄūųą┼╠¢╠Ä└Ē Ų„(digital signal processor,DSP)ĪóæTąį£y┴┐ å╬ į¬(inertial measurement unit,IMU) ĪóGPS ī¦║ĮČ©╬╗ŽĄĮyĪóļŖūėč█Ą╚ĪŻ
(2)Ąū▒P(chassis) ĪŻ ų„ę¬ė├ė┌░▓čb╗“▀BĮėÖC¾w┼c▌åŽĄŻ¼öyĦ║═╣╠Č©“īäėŽĄĮyŻ¼░³└©ļŖÖC ╝░Ųõ╦┼Ę■ÖCśŗĪŻ
(3)▌åŽĄ(wheels) ĪŻ ė╔ū¾▌åĪóėę▌åĪó▌å▌S╗“ é„äėÖCśŗĮM│╔ĪŻū¾▌å║═ėę▌å═©▀^▌å▌S╗“é„äėÖCśŗ░▓čbį┌Ąū▒PĄ─ū¾ėęā╔é╚Ż¼Ęųäeė╔ū¾ļŖÖC║═ėęļŖÖC“īäėĪŻ
ā╔▌åÖCŲ„╚╦Ą─ųžą─ę╗░Ń╬╗ė┌▌åŽĄ▌SŠĆų«╔ŽŻ¼ę“Č°ą╬│╔┴╦ā╚į┌╣╠ėąĄ─▓╗ĘĆČ© äė┴”īW╠žąįĪŻ
ŠžĻćé„ĖąŲ„ŠWĮjŠ═─▄ē“╠ß╣®╬’¾wą╬ĀŅĄ─Å═ļsöĄō■,▀@ĘNą┼ŽóĘų╬÷╝╝ągĮąū÷ą╬ĀŅūRäe ,▓╔ė├ē║ļŖį¬╝■Ą─ŠžĻćé„ĖąŲ„,─▄ē“½@Ą├╬’¾wū„ė├┴”ą╬│╔Ą─ė│Ž±
╬óą═ķ_ĻP┐╔─▄╩ŪĮėė|é„ĖąŲ„ūŅĮøØ·║═ūŅ│Żė├Ą─ŅÉą═,ūo╬’¾w▓╗╩▄ĄĮ▀^┤¾Ą─ū„ė├┴”;Ė¶ļx╩ĮļpæBĮėė|é„ĖąŲ„ŽĄĮyų„ę¬ė╔ļpĘĆæBķ_ĻPĮM│╔,ųžÅ═Č╚┐╔▀_1”╠m, Ęų▒µČ╚×ķ2 ”╠m
Įī┘ļŖūĶą═┴”ėXé„ĖąŲ„£yČ©ļŖūĶĮzĄ─ūĶųĄūā╗»Ż¼Š═┐╔ų¬Ą└╬’¾wĄ─ą╬ūā┴┐Ż¼▀MČ°Ū¾│÷═Ōū„ė├┴”;░ļī¦¾wą═┴”ėXé„ĖąŲ„Ą─æ¬ūāŽĄöĄ┐╔▀_100Ī½200,│▀┤ńąĪŻ¼ņ`├¶Č╚Ė▀Ż¼ę“Č°┐╔┐┐ąį║▄Ė▀
ė╔╦┘Č╚£y┴┐▀Mąą═Ųč▌,▀@ĘNĘĮĘ©║▄ļy½@Ą├ØMęŌĄ─£y┴┐ĮY╣¹;ęčų¬┘|┴┐Ą─╬’¾w╝ė╦┘Č╚╦∙«a╔·Ą─┴”╩Ū┐╔ęį£y┴┐Ą─;┼c▒╗£y╝ė╦┘Č╚ėąĻPĄ─┴”┐╔ęį×ķļŖ┤┼┴”╗“ļŖäė┴”,░čĘĮ│╠╩Į║å╗»×ķī”ļŖ┴„Ą─£y┴┐å¢Ņ}
ų▒┴„£y╦┘░lļŖÖC╦³é„╦═ę╗éĆš²▒╚ė┌╩▄┐ž╦┘Č╚Ą─ų▒Įėą┼╠¢ĪŻ▀@ĘNé„Ėą Ų„Ą─▀xō±╩Ūė╔ŲõŠĆąįČ╚(┐╔▀_0.1%)Īó┤┼£■│╠Č╚ĪóūŅ┤¾┐╔ė├╦┘Č╚(▀_3000Ī½8000r/min) ęį ╝░æT┴┐ģóöĄøQČ©Ą─
ų▒ŠĆęŲäėé„ĖąŲ„ėąļŖ╬╗ėŗ╩Įé„ĖąŲ„║═┐╔š{ūāē║Ų„ā╔ĘN;ūŅ│ŻęŖĄ─╬╗ęŲé„ĖąŲ„╩Ūų▒ŠĆ╩ĮļŖ╬╗ėŗ,«öžō▌dļŖūĶ×ķ¤oĖF┤¾ĢrŻ¼ļŖ╬╗ėŗĄ─▌ö│÷ļŖē║u₂ ┼c ļŖ ╬╗ ėŗā╔Č╬Ą─ļŖūĶ│╔▒╚└²
ÖCŲ„╚╦╣żū„šŠā╚Ą─é„ĖąŲ„ų„ę¬ė├ė┌ķgĮė╠ß╣®ųąķgėŗ╦ŃĮY╣¹╗“ų▒Įė╠ß╣®╚╬äš│╠ą“ųą╚╬║╬čėŲ┌öĄō■ųĄ;ę╗éĆĘŪĮėė|╩Įé„ĖąŲ„ī”─▄┴┐░l╔õčbų├╦∙«a╔·Ą─Ė╔ö_═∙═∙╩Ū║▄├¶ĖąĄ─
▀^ė▓╝■░čŽÓĻP─┐ś╦╠žąį▐DōQ×ķą┼╠¢;░č╦∙½@ą┼╠¢ūāōQ×ķęÄäØ╝░ł╠ąą─│éĆÖCŲ„╚╦╣”─▄╦∙ąĶꬥ─ą┼ŽóŻ¼░³└©ŅA╠Ä └Ē║═ĮŌßīā╔éĆ▓Į¾E,▀@ĘNą┼Žó┐╔▒╗Ę┤üęįą▐ š²║═ųžÅ═įōĖąėXĒśą“Ż¼ų▒ų┴Ą├ĄĮ╦∙ąĶꬥ─ą┼Žó×ķų╣
é„ĖąŲ„ė÷ĄĮ╠žČ©ÜŌ╬ČĢ■«a╔·ļŖūĶ╗“š▀Ņl┬╩Ą─ūā╗»Ż¼╬ęéāŠ═╩Ūīó▀@ą®ūā ╗»▓ČūĮĄĮŻ¼▓ó▐D╗»│╔─▄ē“é„▀fĄ─ļŖą┼╠¢Ż¼╚╗║¾ī”é„ĖąŲ„Ļć┴ąé„╚ļĄ─ą┼╠¢▀Mąą×V ▓©ĪóĘ┼┤¾║═╠žš„╠ß╚Ī
▓┐ŽÓĻP┬ō║»öĄ(Head-Related Transfer Function,HRTF)Ę©ĪóĢrčė╣└ėŗ(Time Delay Of Arrival,TDOA) Ę©Īó╗∙ė┌ūŅ┤¾▌ö│÷╣”┬╩Ą─┐╔┐ž▓©╩°ą╬│╔ĘĮĘ©Īó╗∙ė┌Ė▀Ęų▒µ┬╩ūV ╣└ėŗĄ─Č©╬╗ĘĮĘ©Īó╔±ĮøŠWĮjČ©╬╗ĘĮĘ©║═╗∙ė┌┬Ģē║Ę∙Č╚▒╚Ą─Č©╬╗ĘĮĘ©Ą╚
╩ūŽ╚ę¬░čįÆę¶ĘųĖŅ│╔å╬į~(╗“ę¶╦ž),╚╗║¾▀MąąšZĘ©Ęų╬÷,ūŅ║¾▒µūR│÷įÆ궥─║¼┴x,ė├Ą├ūŅČÓĄ─╩Ū─Ż╩ĮŲź┼õĘĮĘ©,╚ńĮyėŗ─Żą═Ą─ļ[Markov─Żą═,į┌┤¾į~ģR┴┐Ą─šZ ę¶ūRäe╔Ž╚ĪĄ├┴╦║▄┤¾Ą─▀Mš╣
┤_Č©ūRäeĘĮĘ©╦∙ė├Ą─╠žš„;īóĮė╩šĄĮĄ─įÆę¶╠ß╚Ī╠žš„ŠžĻć;┼c╩┬Ž╚┤µā”į┌ŽĄĮyų«ā╚Ą─ś╦£╩─Ż░ÕųąĄ─╠žš„ŠžĻćŽÓ▒╚▌^Ż¼ėŗ╦Ń╦³éāĄ─ŠÓļx;┤_Č©╦∙šfĄ─įÆ╩Ū╩▓├┤