į┌ėæšō╝ė╦┘Č╚é„ĖąŲ„Ģrīóė├ĄĮæ¬ūāāxĄ─╣żū„įŁ└Ē╝░ĮY šōĪŻ╔ņ┐s£y┴┐āx╩Ūę╗ĘNæ¬┴”é„ĖąŲ„Ż¼ ę╗░Ńė├ė┌£y┴┐ÖCąĄĮY śŗĄ─ūāą╬Ż¼▀MČ°ėŗ╦Ń│÷╩®ė┌įōÖCąĄĮYśŗĄ─ē║┴”ĪŻ
▓─┴Žūāą╬Ą─£y┴┐ĘĮĘ©╩Ūęį╗▌╦╣═©(Wheastone) ļŖś“×ķ ╗∙ĄAĄ─Ż¼╚ńłD6-8╦∙╩ŠĪŻłDųąŻ║
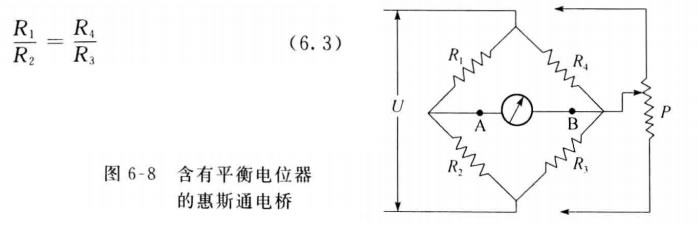
īŹļH╔ŽŻ¼łD6-8ųąĄ─╦─éĆļŖūĶ(R₁~R₄) ▓╔ė├ś╦£╩ļŖ ūĶĪŻ╚½╠ūįOéõĄ─ā׳cį┌ė┌Ųõ─▄ęįŠĆąį▀Mąą╣żū„ĪŻ
į┌æ¬ė├╗▌╦╣═©ļŖś“ĢrąĶę¬┐╝æ]ĄĮŻ¼ļŖē║U Ą─░l╔·Ų„æ¬Ė▀Č╚ĘĆČ©Ż¼ĮėŠĆŽĄĮyæ¬╝Üą─įO ėŗĪŻ╚ń╣¹ĮėŠĆ▓╗║Ž└ĒŻ¼─Ū├┤┐╔─▄│÷¼Fī¦ŠĆļŖūĶŲ½▓Ņęį╝░ļŖūĶųĄļS£žČ╚ūāäėĄ─ŪķørĪŻė╔ļŖś“«a╔·Ą─ą┼╠¢║▄╬ó╚§Ż¼ąĶę¬╝ėęįĘ┼┤¾ĪŻĘ┼┤¾ ę╗░Ń░³└©ā╔JŻ¼├┐JĘ┼┤¾Ų„Š▀ėąĖ▀Ą─▌ö╚ļūĶ ┐╣║═Ą═Ą─£žČ╚Ų»ęŲĪŻ
╝ė╦┘Č╚é„ĖąŲ„ė├ė┌£y┴┐╣żśIÖCŲ„╚╦Ą─äėæB┐žųŲą┼╠¢Ż¼╦³Š▀ėąČÓĘN▓╗═¼Ą─£y┴┐ĘĮĘ©Ż║
1)ė╔╦┘Č╚£y┴┐▀Mąą═Ųč▌ĪŻė╔ė┌ą┼įļ▒╚Ą─Ž┬ĮĄŻ¼▀@ĘNĘĮĘ©║▄ļy½@Ą├ØMęŌĄ─£y┴┐ĮY╣¹ĪŻ
2)ęčų¬┘|┴┐Ą─╬’¾w╝ė╦┘Č╚╦∙«a╔·Ą─┴”╩Ū┐╔ęį£y┴┐Ą─ĪŻ▀@ĘNé„ĖąŲ„æ¬ė├┴╦æ¬ūāāxĪŻ
3)┼c▒╗£y╝ė╦┘Č╚ėąĻPĄ─┴”┐╔ė╔ ę╗ éĆęčų¬┘|┴┐«a╔·ĪŻ▀@ĘN┴”┐╔ęį×ķļŖ┤┼┴”╗“ļŖäė┴” . Č°░čĘĮ│╠╩Į║å╗»×ķī”ļŖ┴„Ą─£y┴┐å¢Ņ}ĪŻ╦┼Ę■ĘĄ╗žé„ĖąŲ„(servo-return sensor)Š═╩Ūę└┤╦įŁ └Ē╣żū„Ą─Ż¼Č°Ūę╩ŪęčėąĄ─Z£╩┤_Ą─╝ė╦┘Č╚é„ĖąŲ„ĪŻ ░▓čbį┌š±äė¾w(╚ńÖCŲ„╚╦ÖCąĄ╩ų)╔ŽĄ─š±ūėčbų├Ż¼«öė├ÅŚ╗╔ų¦ō╬ųž╬’ĢrŻ¼Ųõš±äė┼c╦┘Č╚ │╔▒╚└²Ąž╦ź£pĪŻčbų├Ą─╬╗ęŲ xĪŻĪóųž╬’┼cčbų├Ą─ŽÓī”╬╗ų├x ų«ķgĄ─ĻPŽĄ╩ŪŻ║
1)«ö═Ō▓┐š±äėŅl┬╩▒╚ŽĄĮy╣╠ėąš±äėŅl┬╩Ė▀Ą├ČÓĄ─Ģr║“Ż¼ x/x ĪŻ ┌ģ ė┌ 1 ĪŻ
2)«ö═Ō▓┐š±äėŅl┬╩▒╚ŽĄĮy╣╠ėąš±äėŅl┬╩Ą═Ą├ČÓĄ─Ģr║“Ż¼ŽÓī”╬╗ęŲx ×ķ═Ō▓┐š±äė╬╗ęŲ xĪŻĄ─Č■┤╬╬óĘųŻ¼╝┤┼c╝ė╦┘Č╚│╔š²▒╚ĪŻ
3)«ö═Ō▓┐š±äėŅl┬╩┼c╣╠ėąš±äėŅl┬╩ŽÓĄ╚ĢrŻ¼ŽÓī”╬╗ęŲx ┼c═Ō▓┐š±äė╦┘Č╚│╔š²▒╚ĪŻ
ę“┤╦Ż¼ų╗ę¬▀m«ö▀xō±╣╠ėąš±äėŅl┬╩Ż¼Š═┐╔ęį░čš±ūėčbų├ū„×ķš±äė╬╗ęŲé„ĖąŲ„Īóš±äė╦┘ Č╚é„ĖąŲ„║═š±äė╝ė╦┘Č╚é„ĖąŲ„╩╣ė├ĪŻ
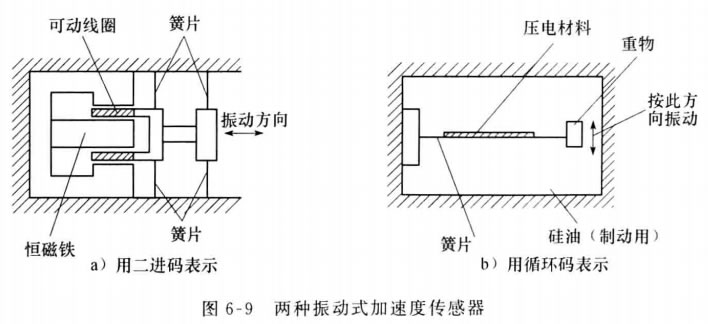
łD6- 9▒Ē╩Šā╔ĘN╝ė╦┘Č╚é„ĖąŲ„Ą─ĮYśŗįŁ└ĒĪŻŲõųąŻ¼łD6- 9a ╩Ūæ¬ė├ļŖ┤┼ą¦æ¬įŁ└ĒĄ─╝ė ╦┘Č╚é„ĖąŲ„ĪŻ«ö┐╔äėŠĆ╚”ļS╬’¾wš±äėČ°╩╣ŪąĖŅ┤┼═©┴┐░l╔·ūā╗»ĢrŻ¼īóį┌┤╦ŠĆ╚”ā╔Č╦«a╔·ļŖ ē║ĪŻ░č┤╦ļŖē║╝ėų┴ę╗Č©žō▌dŻ¼Š═─▄£y│÷┼cļŖ┤┼┴”ėąĻPĄ─ļŖ┴„ĪŻłD6-9b ät╩Ūæ¬ė├ē║ļŖūāōQ įŁ└ĒĄ─╝ė╦┘Č╚é„ĖąŲ„ĪŻį┌Ōü╦ßõ^Ą╚ē║ļŖ▓─┴ŽųąŻ¼īó«a╔·┼c═Ō╝ėæ¬ūā│╔š²▒╚Ą─ļŖä▌Ż¼ę“Č°ę▓ ┐╔ęį═©▀^ī”ļŖä▌╗“ļŖ┴„Ą─£y┴┐üĒ£yČ©╝ė╦┘Č╚ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |